General compliant aerial Robotic manipulation system Integrating Fixed and Flapping wings to INcrease range and safety
Fecha
Breve reseña
The goal of GRIFFIN is the derivation of a unified framework with methods, tools and technologies for the development of flying robots with dexterous manipulation capabilities.
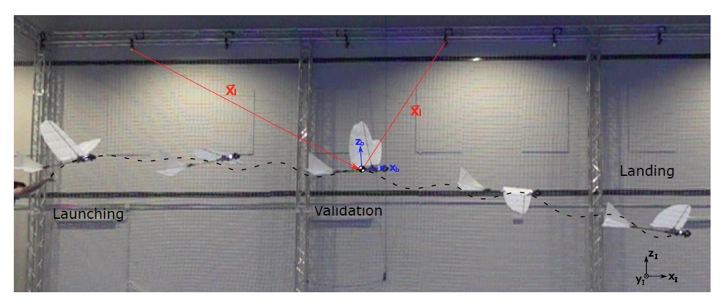
In GRIFFIN we are developing a new generation of bio-inspired aerial robots that are more efficient and safer than conventional multi-rotors. They combine flapping wings with gliding to save energy. Also, they do not have propellers and are therefore safer in interaction with people and objects in the environment. They are the first ornithopters (flapping wing aircrafts) that do not need a remote pilot to fly and perform complex missions. Thus, they are completely autonomous thanks to the on-board perception and control system, which is capable of navigating, avoiding obstacles and planning trajectories in real time. In addition, they are the first ornithopters with manipulation capacity. Thus, they are able to perch, for example on a branch, and carry out manipulations while maintaining their balance. Thus, our robots will be able to transport and deliver light objects flying over people, without any risk, and also carry out inspection, including inspections that require contact, in places where conventional multi-rotors cannot operate for safety reasons. We think they could be also useful in search and rescue missions, not only detecting victims, but also landing on their body and taking vital signs measurements or delivering emergency supplies.
The robots will be able to fly minimizing energy consumption, to perch on curved surfaces and to perform dexterous manipulation. Flying will be based on foldable wings with flapping capabilities. They will be able to safely operate in sites where rotorcrafts cannot do it and physically interact with people. Dexterous manipulation will be performed maintaining fixed contact with a surface, such as a pole or a pipe, by means of one or more limbs and manipulating with others overcoming the limitations of dexterous manipulation in free flying of existing aerial manipulators. Compliance will play an important role in these robots and in their flight and manipulation control methods. The control systems will be based on appropriate kinematic, dynamic and aerodynamic models. The GRIFFIN robots will have autonomous perception, reactivity and planning based on these models. They will be also able to associate with others to perform cooperative manipulation tasks. New software tools will be developed to facilitate the design and implementation of these complex robotic systems. Thus, configurations with different complexity could be derived depending on the requirements of flight endurance and manipulation tasks from simple grasping to more complex dexterous manipulation. The implementation will be based on additive and shape deposition manufacturing to fabricate multi-material parts and parts with embedded electronics and sensors. In GRIFFIN we will develop a small flapping wings proof of concept prototype which will be able to land autonomously on a small surface by using computer vision, a manipulation system with the body attached to a pole, and finally full size prototypes which will demonstrate flying, landing and manipulation, including cooperative manipulation, by maintaining the equilibrium.
Web: