Allgemeines konformes Luftroboter-Manipulationssystem, das feste und schlagende Flügel integriert, um Reichweite und Sicherheit zu erhöhen
Datum
Kurzer Bericht
Das Ziel von GRIFFIN ist die Ableitung eines einheitlichen Rahmenwerks mit Methoden, Werkzeugen und Technologien für die Entwicklung von Flugrobotern mit geschickten Manipulationsfähigkeiten.
Bei GRIFFIN entwickeln wir eine neue Generation bioinspirierter Flugroboter, die effizienter und sicherer sind als herkömmliche Multirotoren. Sie kombinieren Flügelschlag mit Gleiten, um Energie zu sparen. Außerdem verfügen sie über keine Propeller und sind daher sicherer im Umgang mit Menschen und Gegenständen in der Umgebung. Sie sind die ersten Ornithopter (Schlagflügelflugzeuge), die zum Fliegen und Durchführen komplexer Missionen keinen Fernpiloten benötigen. Dank des integrierten Wahrnehmungs- und Kontrollsystems, das in der Lage ist, in Echtzeit zu navigieren, Hindernissen auszuweichen und Flugbahnen zu planen, sind sie völlig autonom. Darüber hinaus sind sie die ersten Ornithopter mit Manipulationsfähigkeit. So sind sie in der Lage, beispielsweise auf einem Ast zu sitzen und Manipulationen durchzuführen, während sie gleichzeitig ihr Gleichgewicht halten. So werden unsere Roboter in der Lage sein, leichte Objekte, die über Menschen fliegen, risikolos zu transportieren und auszuliefern und auch Inspektionen, auch mit Kontakt, an Orten durchzuführen, an denen herkömmliche Multirotoren aus Sicherheitsgründen nicht funktionieren können. Wir glauben, dass sie auch bei Such- und Rettungseinsätzen nützlich sein könnten, indem sie nicht nur Opfer aufspüren, sondern auch auf ihren Körpern landen und Vitalfunktionen messen oder Notvorräte liefern.
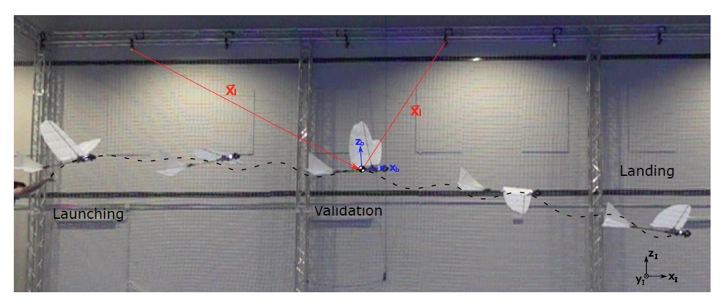
Die Roboter werden in der Lage sein, energiesparend zu fliegen, auf gekrümmten Oberflächen zu sitzen und geschickte Manipulationen durchzuführen. Das Fliegen wird auf faltbaren Flügeln mit Schlagfähigkeit basieren. Sie werden in der Lage sein, sicher an Standorten zu operieren, an denen Drehflügler dies nicht können, und physisch mit Menschen zu interagieren. Bei der geschickten Manipulation wird mit einem oder mehreren Gliedmaßen ein fester Kontakt mit einer Oberfläche wie einer Stange oder einem Rohr aufrechterhalten und mit anderen Gliedmaßen manipuliert, wobei die Einschränkungen der geschickten Manipulation beim freien Fliegen bestehender Luftmanipulatoren überwunden werden. Compliance wird bei diesen Robotern und ihren Flug- und Manipulationskontrollmethoden eine wichtige Rolle spielen. Die Steuerungssysteme basieren auf geeigneten kinematischen, dynamischen und aerodynamischen Modellen. Die GRIFFIN-Roboter werden auf der Grundlage dieser Modelle über eine autonome Wahrnehmung, Reaktionsfähigkeit und Planung verfügen. Sie werden auch in der Lage sein, sich mit anderen zusammenzuschließen, um kooperative Manipulationsaufgaben durchzuführen. Es werden neue Softwaretools entwickelt, um den Entwurf und die Implementierung dieser komplexen Robotersysteme zu erleichtern. Somit könnten Konfigurationen mit unterschiedlicher Komplexität abgeleitet werden, abhängig von den Anforderungen an Flugausdauer und Manipulationsaufgaben vom einfachen Greifen bis hin zu komplexeren geschickten Manipulationen. Die Implementierung wird auf additiver Fertigung und Formauftragsfertigung basieren, um Teile aus mehreren Materialien und Teile mit eingebetteter Elektronik und Sensoren herzustellen. Bei GRIFFIN werden wir einen Proof-of-Concept-Prototyp mit kleinen Schlagflügeln entwickeln, der mithilfe von Computer Vision und einem Manipulationssystem, bei dem der Körper an einer Stange befestigt ist, autonom auf einer kleinen Oberfläche landen kann, und schließlich Prototypen in Originalgröße, die das Fliegen demonstrieren. Landung und Manipulation, einschließlich kooperativer Manipulation, durch Aufrechterhaltung des Gleichgewichts.
Netz: