Antenna a norma generale Sistema di manipolazione robotica che integra ali fisse e battenti per aumentare la portata e la sicurezza
Data
Breve relazione
L'obiettivo di GRIFFIN è la creazione di un quadro unificato con metodi, strumenti e tecnologie per lo sviluppo di robot volanti con abili capacità di manipolazione.
Alla GRIFFIN stiamo sviluppando una nuova generazione di robot aerei ispirati alla biologia, più efficienti e sicuri dei multirotori convenzionali. Combinano il battito delle ali con il volo a vela per risparmiare energia. Inoltre, non hanno eliche e sono quindi più sicuri nell'interazione con persone e oggetti nell'ambiente. Sono i primi ornitotteri (velivoli ad ala battente) che non necessitano di un pilota remoto per volare ed eseguire missioni complesse. Sono quindi completamente autonomi grazie al sistema di percezione e controllo di bordo, capace di navigare, evitare ostacoli e pianificare traiettorie in tempo reale. Inoltre, sono i primi ornitotteri dotati di capacità di manipolazione. Possono così appollaiarsi, ad esempio su un ramo, ed effettuare manipolazioni mantenendo l'equilibrio. Pertanto, i nostri robot saranno in grado di trasportare e consegnare oggetti leggeri sorvolando le persone, senza alcun rischio, e anche di effettuare ispezioni, comprese quelle che richiedono il contatto, in luoghi dove i multirotori convenzionali non possono operare per motivi di sicurezza. Pensiamo che potrebbero essere utili anche nelle missioni di ricerca e salvataggio, non solo per individuare le vittime, ma anche per atterrare sul loro corpo e misurare i segni vitali o consegnare forniture di emergenza.
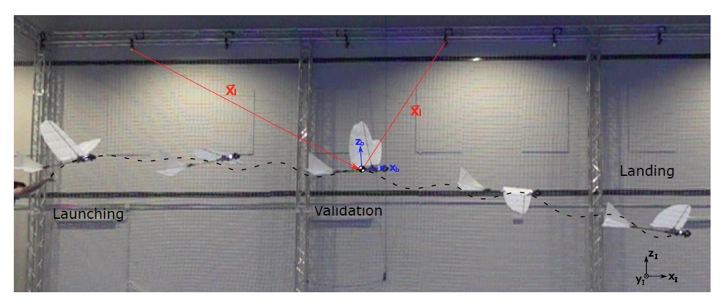
I robot saranno in grado di volare riducendo al minimo il consumo di energia, di appollaiarsi su superfici curve ed eseguire abili manipolazioni. Il volo sarà basato su ali pieghevoli con capacità di sbattere. Saranno in grado di operare in sicurezza in siti dove gli elicotteri non possono farlo e di interagire fisicamente con le persone. La manipolazione abile verrà eseguita mantenendo il contatto fisso con una superficie, come un palo o un tubo, mediante uno o più arti e manipolando con altri superando le limitazioni della manipolazione abile nel volo libero dei manipolatori aerei esistenti. La conformità giocherà un ruolo importante in questi robot e nei loro metodi di controllo del volo e della manipolazione. I sistemi di controllo saranno basati su opportuni modelli cinematici, dinamici ed aerodinamici. I robot GRIFFIN avranno percezione, reattività e pianificazione autonome basate su questi modelli. Saranno anche in grado di associarsi con altri per eseguire compiti di manipolazione cooperativa. Verranno sviluppati nuovi strumenti software per facilitare la progettazione e l’implementazione di questi complessi sistemi robotici. Pertanto, potrebbero essere derivate configurazioni con diversa complessità a seconda dei requisiti di resistenza al volo e di compiti di manipolazione, dalla semplice presa alla manipolazione più complessa e abile. L’implementazione si baserà sulla produzione additiva e con deposizione di forma per fabbricare parti multimateriali e parti con elettronica e sensori incorporati. In GRIFFIN svilupperemo un prototipo dimostrativo di piccole ali battenti che saranno in grado di atterrare autonomamente su una piccola superficie utilizzando la visione artificiale, un sistema di manipolazione con il corpo attaccato a un palo, e infine prototipi a grandezza naturale che dimostreranno il volo, atterraggio e manipolazione, inclusa la manipolazione cooperativa, mantenendo l'equilibrio.
Ragnatela: