Système de manipulation robotique aérienne conforme aux normes générales, intégrant des ailes fixes et battantes pour accroître la portée et la sécurité
Date
Bref rapport
L'objectif de GRIFFIN est de mettre au point un cadre unifié comprenant des méthodes, des outils et des technologies pour le développement de robots volants dotés de capacités de manipulation complexes.
Chez GRIFFIN, nous développons une nouvelle génération de robots aériens bio-inspirés, plus performants et plus sûrs que les multirotors classiques. Combinant le battement d'ailes et le vol plané, ils optimisent leur consommation d'énergie. Dépourvus d'hélices, ils interagissent en toute sécurité avec les personnes et les objets environnants. Premiers ornithoptères (aéronefs à ailes battantes) capables de voler et d'accomplir des missions complexes sans pilote à distance, ils sont entièrement autonomes grâce à leur système embarqué de perception et de contrôle. Ce système leur permet de naviguer, d'éviter les obstacles et de planifier leurs trajectoires en temps réel. Premiers ornithoptères dotés de capacités de manipulation, ils peuvent se percher, par exemple sur une branche, et effectuer des manipulations tout en conservant leur équilibre. Nos robots pourront ainsi transporter et livrer des objets légers en survolant les personnes, sans aucun risque, et réaliser des inspections, y compris celles nécessitant un contact physique, dans des zones inaccessibles aux multirotors classiques pour des raisons de sécurité. Nous pensons qu'ils pourraient également être utiles lors de missions de recherche et de sauvetage, non seulement pour localiser les victimes, mais aussi pour se poser sur leur corps et prendre des mesures de leurs signes vitaux ou pour livrer des fournitures d'urgence.
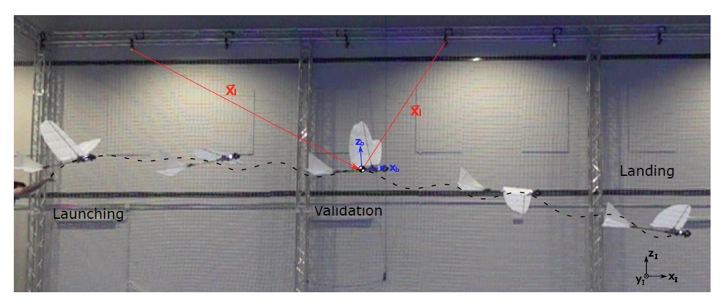
Les robots pourront voler en minimisant leur consommation d'énergie, se poser sur des surfaces courbes et effectuer des manipulations précises. Le vol sera assuré par des ailes repliables et battantes. Ils pourront opérer en toute sécurité dans des environnements inaccessibles aux aéronefs à rotors et interagir physiquement avec les personnes. Les manipulations précises seront réalisées en maintenant un contact fixe avec une surface, telle qu'un poteau ou un tuyau, grâce à un ou plusieurs membres, et en manipulant d'autres éléments, surmontant ainsi les limitations des manipulateurs aériens actuels en vol libre. La flexibilité jouera un rôle important dans le fonctionnement de ces robots et dans leurs méthodes de contrôle de vol et de manipulation. Les systèmes de contrôle seront basés sur des modèles cinématiques, dynamiques et aérodynamiques appropriés. Les robots GRIFFIN disposeront d'une perception, d'une réactivité et d'une planification autonomes basées sur ces modèles. Ils pourront également s'associer pour effectuer des tâches de manipulation coopératives. De nouveaux outils logiciels seront développés pour faciliter la conception et la mise en œuvre de ces systèmes robotiques complexes. Ainsi, des configurations de complexité variable pourront être conçues en fonction des exigences d'autonomie de vol et des tâches de manipulation, allant de la simple préhension à des manipulations plus complexes et précises. La mise en œuvre reposera sur la fabrication additive et le dépôt de matière pour produire des pièces multi-matériaux et des pièces intégrant des composants électroniques et des capteurs. Dans le cadre du projet GRIFFIN, nous développerons un prototype de démonstration de faisabilité à ailes battantes de petite taille, capable d'atterrir de manière autonome sur une petite surface grâce à la vision par ordinateur, un système de manipulation avec un corps fixé à une perche, et enfin des prototypes grandeur nature qui démontreront le vol, l'atterrissage et la manipulation, y compris la manipulation coopérative, en maintenant l'équilibre.
La toile: