Sistema de manipulação robótica aérea em conformidade geral Integrando asas fixas e oscilantes para aumentar o alcance e a segurança
Data
Breve relato
O objetivo do GRIFFIN é a derivação de uma estrutura unificada com métodos, ferramentas e tecnologias para o desenvolvimento de robôs voadores com capacidade de manipulação hábil.
Na GRIFFIN estamos desenvolvendo uma nova geração de robôs aéreos de inspiração biológica que são mais eficientes e seguros que os multirotores convencionais. Eles combinam bater asas com deslizamento para economizar energia. Além disso, não possuem hélices e, portanto, são mais seguros na interação com pessoas e objetos do ambiente. São os primeiros ornitópteros (aeronaves de asas oscilantes) que não necessitam de piloto remoto para voar e realizar missões complexas. Assim, são totalmente autônomos graças ao sistema de percepção e controle de bordo, que é capaz de navegar, evitar obstáculos e planejar trajetórias em tempo real. Além disso, são os primeiros ornitópteros com capacidade de manipulação. Assim, conseguem pousar, por exemplo num galho, e realizar manipulações mantendo o equilíbrio. Assim, nossos robôs poderão transportar e entregar objetos leves sobrevoando pessoas, sem qualquer risco, e também realizar inspeções, inclusive inspeções que exijam contato, em locais onde os multirrotores convencionais não podem operar por questões de segurança. Acreditamos que também poderão ser úteis em missões de busca e salvamento, não só na deteção de vítimas, mas também na aterragem sobre o seu corpo e na medição dos sinais vitais ou na entrega de fornecimentos de emergência.
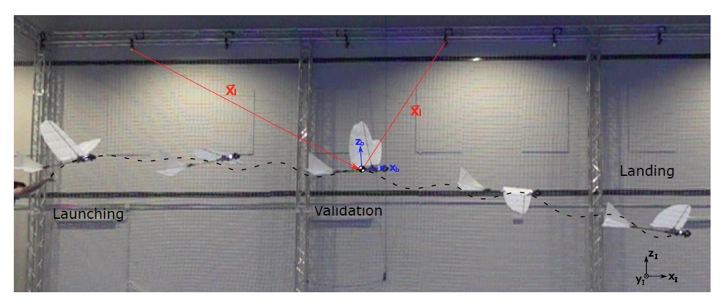
Os robôs serão capazes de voar minimizando o consumo de energia, pousar em superfícies curvas e realizar manipulações hábeis. O vôo será baseado em asas dobráveis com capacidade de bater. Eles serão capazes de operar com segurança em locais onde os helicópteros não podem fazê-lo e interagir fisicamente com as pessoas. A manipulação hábil será realizada mantendo contato fixo com uma superfície, como um poste ou um cano, por meio de um ou mais membros e manipulando com outros superando as limitações da manipulação hábil no vôo livre dos manipuladores aéreos existentes. A conformidade desempenhará um papel importante nestes robôs e nos seus métodos de controle de voo e manipulação. Os sistemas de controlo basear-se-ão em modelos cinemáticos, dinâmicos e aerodinâmicos adequados. Os robôs GRIFFIN terão percepção autônoma, reatividade e planejamento baseados nestes modelos. Eles também serão capazes de se associar a outras pessoas para realizar tarefas de manipulação cooperativa. Novas ferramentas de software serão desenvolvidas para facilitar a concepção e implementação destes complexos sistemas robóticos. Assim, configurações com diferentes complexidades poderiam ser derivadas dependendo dos requisitos de resistência de vôo e tarefas de manipulação, desde a simples preensão até a manipulação hábil mais complexa. A implementação será baseada na fabricação aditiva e por deposição de formas para fabricar peças multimateriais e peças com eletrônicos e sensores incorporados. No GRIFFIN desenvolveremos um protótipo de prova de conceito de pequenas asas batendo que será capaz de pousar autonomamente em uma pequena superfície usando visão computacional, um sistema de manipulação com o corpo preso a um poste e, finalmente, protótipos em tamanho real que demonstrarão voar, pouso e manipulação, incluindo manipulação cooperativa, mantendo o equilíbrio.
Rede: